


-
说到UWB定位原理必须先从UWB技术的测距原理说起:
双向飞行时间法(TW-TOF,two way-time of flight )每个模块从启动开始即会生成一条独立的时间戳。

-
接着更详细的把测距原理说清楚:
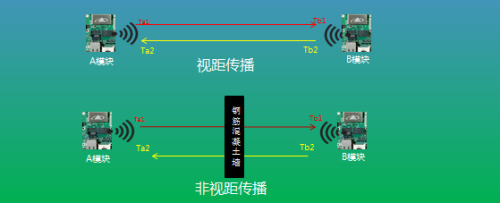
TOF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间往返的飞行时间来测量节点间的距离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。
我们将发送端发出数据包和接收回应的时间间隔记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT。那么数据包在空中的单向飞行时间TTOF可以计算为:

-
然后根据TTOF与电磁波传播速度的乘积便可算出两点间距离。d=c×TTOF
TOF测距方法有两个关键的约束:
1、发送设备和接收设备必须始终同步;
2、接收设备提供信号的传输时间的长短。为了实现时钟同步,TOF 测距方法采用了时钟偏移量来解决时钟同步问题。但由于TOF测距方法的时间依赖于本地和远程节点,测距精度容易受两端节点中时钟偏移量的影响。为了减少此类错误的影响,这里采用反向测量方法,即远程节点发送数据包,本地节点接收数据包,并自动响应,通过平均在正向和反向多次测量的平均值,减少对任何时钟偏移量的影响,从而减少测距误差。
UWB测距技术的主要误差来源:
非视距传播视距传播是得到准确的信号特征测量值的必要条件,当两个点之不存在直接传播路径时,只有信号的反射和衍射成分能够到达接收端,此时第一个到达的脉冲的时间不能代表真实值,存在非视距误差。


-
UWB定位技术原理
前面详细介绍了UWB技术的测距原理,掌握了测距原理之后再来说定位原理就简单了。其实UWB的定位原理和卫星导航定位原理很相似。如下图,天上的卫星坐标为已知,地上的接收设备同时接收到四个卫星的信号就能确定自己的位置坐标(平面和高程坐标)。UWB的定位原理就是通过在室内布置4个已知坐标的定位基站,需要定位的人员或者设备携带定位标签,标签按照一定的频率发射脉冲,不断和四个已知位置的基站进行测距,通过一定的算法精确的计算出定位标签的位置。

感谢您的来访,获取更多精彩文章请收藏本站。














暂无评论内容